APNにおける触覚を伴った遠隔ロボット制御技術
遠隔地でも目の前で触れたかのようなリアルタイムで安定した操作感を確認

技術背景・課題
近年、パンデミックや少子高齢化にともなう労働力不足などの影響を受け、遠隔ロボット制御技術への関心が高まっています。バイラテラル制御技術は、操作者の動作に応じて遠隔地にあるロボットアームを連動させられるロボット制御技術です。特に高精度で安定した動作が求められる医療などの分野に応用する場合には、操作者とロボットアーム間の伝送における遅延や揺らぎが問題となることがあります。そのため、遠隔での精密ロボット制御の実現には高精度なロボットアームの活用に加え、遠隔地間を低遅延で安定して繋ぐことができる通信技術が必要となります。
技術の概要・特徴・内容
APNを活用した遠隔ロボット制御の実証を以下の分担で行いました。
NTT: APNテスト用環境とAPNにて優れた性能を発揮する低遅延トランスポート技術を提供し、APN接続試験およびネットワーク条件の評価実験を実施。
ソニー: 精密バイラテラル制御システム、空間再現ディスプレイ『ELF-SR2』と3D映像の撮像および処理技術、ならびに、操作支援のための先端位置や奥行きを示すUI重畳や仮想力場による力の誘導技術を提供し、動作評価を実施。
技術目標・成果・効果
(1)低遅延トランスポート技術
非圧縮映像伝送技術: 映像データをSDI(Serial Digital Interface)信号からSMPTE(Society of Motion Picture and Television Engineers) ST 2110ストリームへダイレクトにマッピングすることによって、送信側での映像入力から受信側での映像出力までの遅延を1ms(ミリセカンド)以内に抑えられる技術です。
RDMAアクセラレーション技術: RDMA(Remote Direct Memory Access)はCPUの介在なくメモリ上のデータを直接ネットワークへ転送できる特徴をもっているため、IOWNが提唱しているディスアグリゲーティッドコンピュティングの高速低遅延データ転送として有望です。しかしながら、RDMAにて信頼性のあるデータ転送を行うRDMA RC(Reliable Connection)はデータセンタ内など短距離のデータ転送を想定しているため、中長距離通信に適用しようとするとパフォーマンスが出ない問題がありました。この問題に対し、転送が成功したかを確認するループバック信号を端末側で擬似生成することでアプリケーション側のRDMA利用方法を変更することなく長延化を可能にしました。
(2)精密バイラテラル制御技術
操作者の動きとロボットアーム先端を高い精度で連動させて、遠隔操作するソニーの技術。アーム先端の位置と三次元方向の力の変化を一定の倍率で操作者側にフィードバックできる特長を有し、力精度1gf(グラム重、ニュートン換算で0.0098N)で1mm未満の位置精度を実現します。対象物を高精度かつ繊細にとりあつかうことが求められる、医療や微細な工作、科学的研究などの分野への応用が期待されています。
(3)実証実験結果
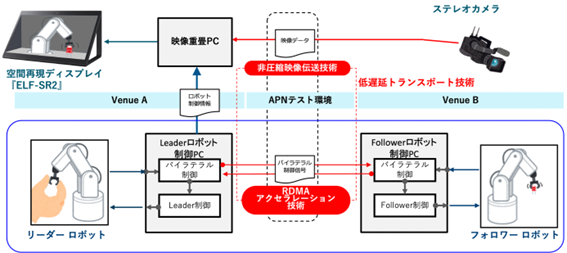
共同実証実験はAPNテスト用環境に低遅延トランスポート技術を用意し、APNの両端にソニーの精密バイラテラル制御システムを接続して行いました(図1)。視覚情報に関しては、3D映像をNTTの非圧縮映像伝送技術を用いてAPNにダイレクトに送出し、実在感のある立体映像を裸眼で見られるソニーの空間再現ディスプレイで操作者側に提示しました。また、力覚情報含む制御情報はソニーの精密バイラテラル制御システムとNTTのRDMAアクセラレーション技術を接続し、APNを介したメモリ間通信で行いました。
評価の結果、APNを介した約120kmにわたる長距離実証実験では、1ms以下の低遅延でエンドツーエンドの安定動作を確認しました。RDMAを用いたアプリケーション側の通信処理は、APNを介した場合も10μs(マイクロセカンド)以下の低揺らぎにて安定動作できました。これにより、APNと低遅延トランスポート技術が伝送の遅延や揺らぎの課題を解決し、近距離を前提としていた精密バイラテラル制御をより離れた地点間に拡張できる可能性が示されました。
想定される適用分野・PoC
今後の展望
今回、距離を感じさせない触覚を伴った遠隔操作の実現に向けて、NTTの低遅延トランスポート技術とソニーの精密バイラテラル制御技術を融合した共同実証をAPNで実施しました。その結果、低遅延・低揺らぎでの精密な遠隔精密操作を確認しました。今後は、具体的なユースケースを考慮した実証実験を実施し、場所の制約を越えた精密な遠隔操作の適用範囲を拡大することで豊かな社会の実現を推進します。