
2.近接場後方散乱ミリ波透視イメージング装置
本装置はミリ波センサ、バッテリー、解析ソフト、走査ガイドで構成されています(写真1参照)。ミリ波センサ内にはミリ波を送受信するためのミリ波モジュールを8個搭載しており、そのミリ波モジュールはコンクリート柱表面に近接するように円周方向に沿ってアレイ配置しています。ミリ波センサの筐体底面は様々な径を有するコンクリート柱の表面と安定して接触できる形状を有しており、対応径は単独柱から共架柱(200mm?400mm)となっています。ミリ波センサの底面には距離計が搭載されており、ミリ波センサ表示部には計測距離が表示される仕組みになっています。走査速度は約4秒で1mを走査できるように設計しており、待機時間や入替時間などを考慮した往復計測時間は約30秒となっています。一度の走査で計測できる幅は44mmで、コンクリート柱全周を走査するためには14回?29回程度の往復計測が必要となります。コンクリート柱1本当りの計測時間は平均的に約20分となっています。これらの計測諸元は表1に、ミリ波センサの仕様は表2にまとめています。なお、本装置は特定小電力無線局を取得することにより電波法への対応を実施しています。
計測データはミリ波センサに接続したUSBメモリに保存されます。一連の計測終了後、USBメモリを取り外し、ソフトウェアを搭載したPCにデータを移行することができます。そして、ソフトウェアにより、計測データの画像化、ひび割れの検知(ひび割れ有無の自動判定)を実施します。
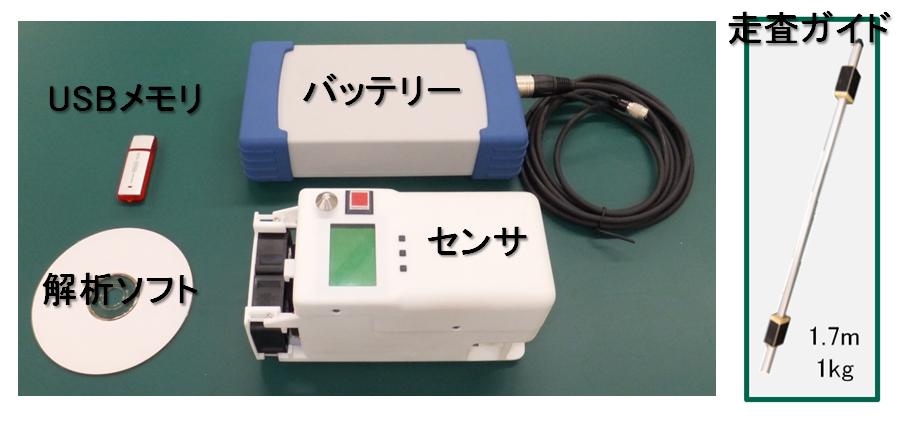
写真1 ミリ波センサ
表1 ミリ波センサの計測緒元
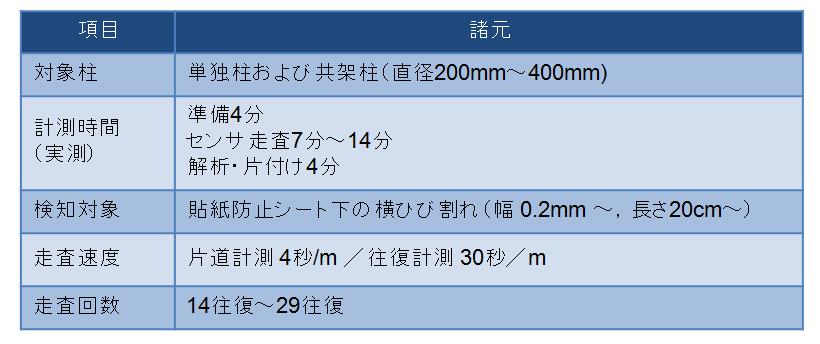
表2 ミリ波センサの仕様

 1.技術のポイント |
 TOP |
 3.計測方法 |