
エッジコンピューティング品質制御技術のスマート農業実証
目次
スマート農業への期待と求められる技術
日本の農業は、担い手の減少や高齢化などにより労働力の不足に直面しています。現在、その解決策として、スマート農業技術の導入が進んでいます。しかし、農作業の多くは依然として人手に頼っているのが現状です。遠隔地にいる人がAIやロボットを活用して農業に取り組めれば、これまで以上に運営や農業経営を効率化することができ、食の安定供給や食料自給率の維持拡大につながります。しかし、ルーラルエリアに多く分布する農業現場は通信環境が悪化することがあり、その通信品質の悪化がロボットの操作性の悪さや動作誤りにつながります。そのため、ネットワークの通信品質の向上とあわせて、通信品質をモニタリング・制御し、遠隔操作に与える悪影響を抑える技術が必要になります。
ネットワークコンピュート高速クローズドループ制御技術
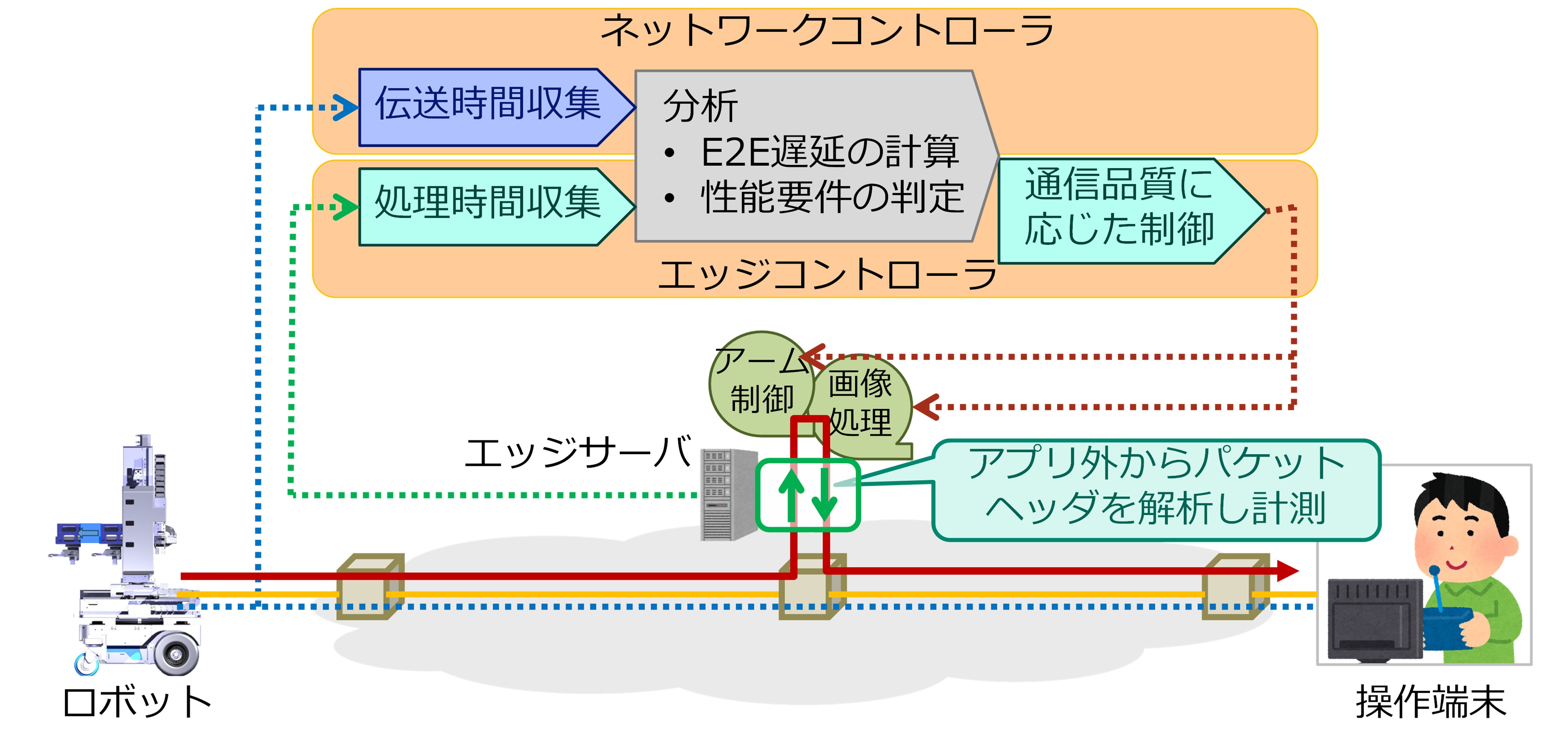
ネットワークコンピュート高速クローズドループ制御技術は、エッジサーバでの処理時間とネットワークの遅延時間をリアルタイムに状態把握し、エンドツーエンドの遅延時間を計算して通信品質の判定を行います。通信品質が性能要件を満たさなくなると、別の経路や別のサーバでの処理に即座に切り替えることで、安定した低遅延サービスを提供する技術です。この技術を高度化し、ロボットの操作性を改善するための機能を追加しました。
ロボットの操作性を改善するための機能
アプリ外からの処理時間計測
アプリの外から入出力データを汎用画像フレームのヘッダ特性を用いて解析し、データの通過時間から処理時間を計算できるようになりました。今までは、画像処理アプリに独自機能を追加することで画像処理時間を計測していましたが、この機能により、画像処理アプリに手を加えなくても、アプリの外でサーバのみで処理時間を計測できるようになり、技術の利用機会が広がります。
品質通知によるシステム連携
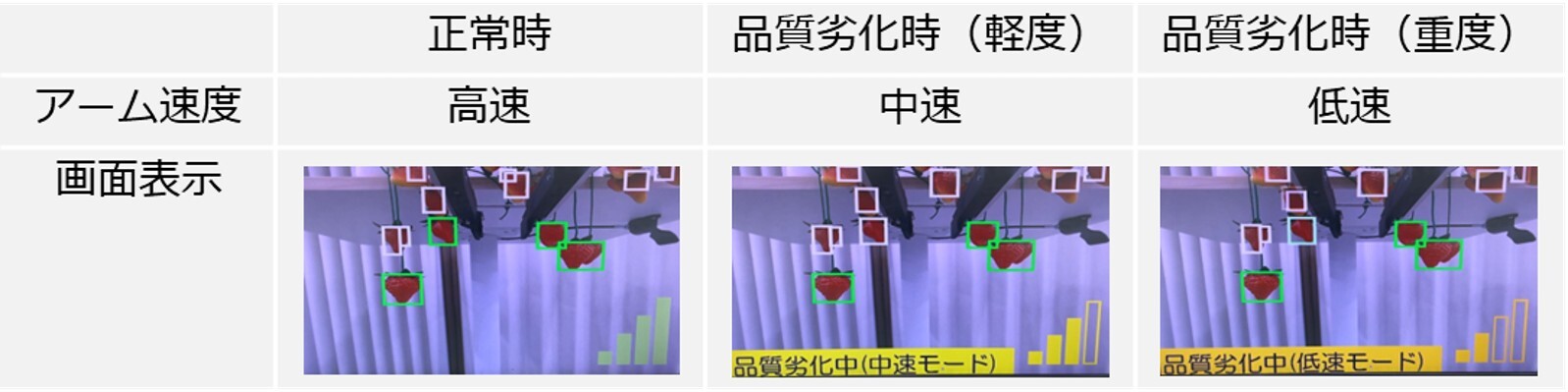
通信品質をリアルタイムに遠隔収穫システムに通知し、システム側で通信品質に応じた制御を行っています。具体的には、通信品質を分析して3段階に分類し、遠隔収穫システムへ通知します。遠隔収穫システムは、操作端末側で表示される映像に通信品質を表示し、操作者にタイムリーに通知します。これで、操作者がエンド・ツー・エンドでの通信品質をリアルタイムに把握できるようになります。また、通信品質に応じて、ロボットアームの動作を減速させます。今までの技術では、遅延が大きい場合、コントローラの操作からアームの動作への反映に時間がかかり、遠隔操作の誤差が大きくなりますが、アームの速度を調整することで、操作精度を高めることができます。
遠隔地からのイチゴの収穫を実証
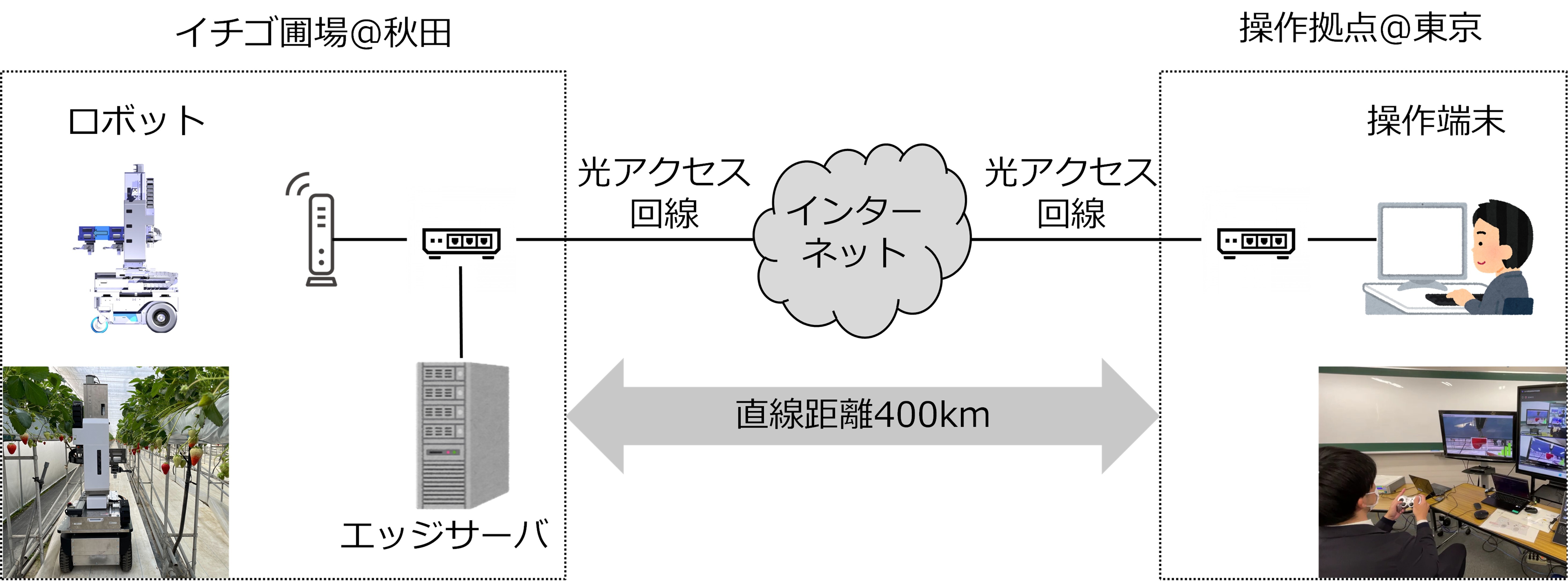
東京都にいる収穫ロボットの操作者が、ネットワークを通じて伝送されたカメラ映像を見ながら、秋田県の圃場にあるロボットを遠隔操作してイチゴを収穫する実証を行いました。収穫ロボットのカメラが撮影した映像を元に、エッジサーバで画像処理を行ってイチゴを収穫できるかを判定し、その結果を映像に追加します。操作者は判定結果が追加された映像をモニタで見ながら、ロボットを遠隔操作します。
今回の実証では、エッジサーバはイチゴ圃場に設置しました。両拠点の間の距離は、直線距離で約400kmあり、光アクセス回線とインターネット回線で接続しました。今回追加した機能を活用することで、収穫ロボットを遠隔から精度高く操作し、イチゴの位置にロボットアームを1回の操作で正確に移動できた割合が約50%から約80%に向上しました。また、イチゴを傷つけずに収穫することができました。さらに、5人の方にロボットの遠隔操作を行って頂き、その全員から、操作性が改善されたことを実感した、と評価いただきました。
まとめ
ネットワークコンピュート高速クローズドループ制御技術と、ロボットの操作性を改善するための機能を用いることで、通信品質が変動する商用ネットワークにおいても、ロボットの遠隔操作による農作業がストレスなくできることを実証しました。これらの技術は農業のみならず、他の業界でも人手不足や技術者不足を解決できる技術です。この技術を実用化・汎用化を通して、場所にとらわれない新たな働き方・労働生産性向上を実現し、産業界の社会的課題の解決をめざしていきます。

関連する記事
NTTニュースリリース
おうちにあるインターネット回線と電気店で買えるコントローラがあれば、遠隔から簡単にロボットの操作ができちゃうんだって!
そうなんだ。エッジコンピューティングを活用することで、今まで遠い存在だった遠隔ロボット操作が、身近にできるようになるんだ。
ロボットに縁遠かった農家さんが、手軽に利用できると人手不足解消もできそうだね。
普段は農地と離れたところで生活している兼業農家さんが遠隔で作業をするのもそうだけど、農業に興味がある人が隙間時間に気軽に農作業に参加したりすることもできるんだよ。
「みんなで育てる日本の農業」みたいな世界が生まれそうだね!