産業用ネットワークの機能ソフト化技術とロボット遠隔自動制御の実証
![]()
- アクセスシステム技術 >
- 産業用ネットワークの機能ソフト化技術とロボット遠隔自動制御の実証
■背景
近年日本では労働人口の減少が進んでおり、多くの業界で人手不足の課題に対して、省人化・自動化の検討が進んでいます。企業の工場の生産ラインについても自動化の検討が進められていますが、複数のロボットを制御する工場の構築においては、機器や制御ソフトの選定自由度や拡張性が課題となっていました。またロボットを操作するための制御機器はロボットごとに隣接して設置する必要があるため、工場内に多くの機器を設置する必要がありました。一方で、新興ベンダのロボットについては、操作系機器のサポートが少なく、容易にはシステムを構築できない課題がありました。
■技術のポイント
従来、ロボットを制御するためのプロトコルドライバと、画像解析などの高度な制御を行う制御機能は、ロボットごとに専用の操作系機器に実装され、ベンダ独自仕様で作られていました(図1(a))。
本技術では、これら専用機器に実装されている機能を分類し、ロボットと通信するプロトコルドライバレイヤと、ロボットの動作をコントロールする制御機能レイヤと、上位管理装置との連携を司る管理ドライバレイヤに分離し、それらのソフト化を実現しました(図1(b))。プロトコルドライバは、ロボットが対応しているプロトコルとの互換性が必要になります。プロトコルドライバをソフト化し複数プロトコルに対応することで、ロボットのプロトコルに依存することなく、ロボットを制御できるようになります。また、制御機能は、ロボットの動作制御だけでなく画像解析による操作の判断の機能も含み、これらをソフト化することで、動作内容に応じて柔軟に切替・更新できることが可能になります。管理ドライバは、他のシステムとの連携制御を可能とするインタフェース機能になります。OpenFlow*1やREST API*2に対応することによりネットワークとの連携制御やその他の機構との連携制御が可能になります。
図1(b)に示すサーバアーキテクチャで産業用ネットワークの機能をソフト化することで、操作系機能を汎用サーバに実装することが可能になり、これによりその機能をエッジ拠点に配置する構成が容易になります(図1(c))。このソフト化技術を用いることで、ロボットの機器選定の自由度が高まり、目的とコストに合ったロボットを選定可能になります。また、ロボット制御のための操作系機能を汎用サーバに実装することで、点在していた操作系専用機器を汎用サーバに集約ができます。さらに、制御機能の汎用アプリが活用可能になり、動作機構構築のための開発コストの低減が見込まれます。また、これらのソフト化機構を、IOWN APN等の光ネットワークを活用することで、ネットワーク越しのエッジ拠点のサーバに実装できるようになります。
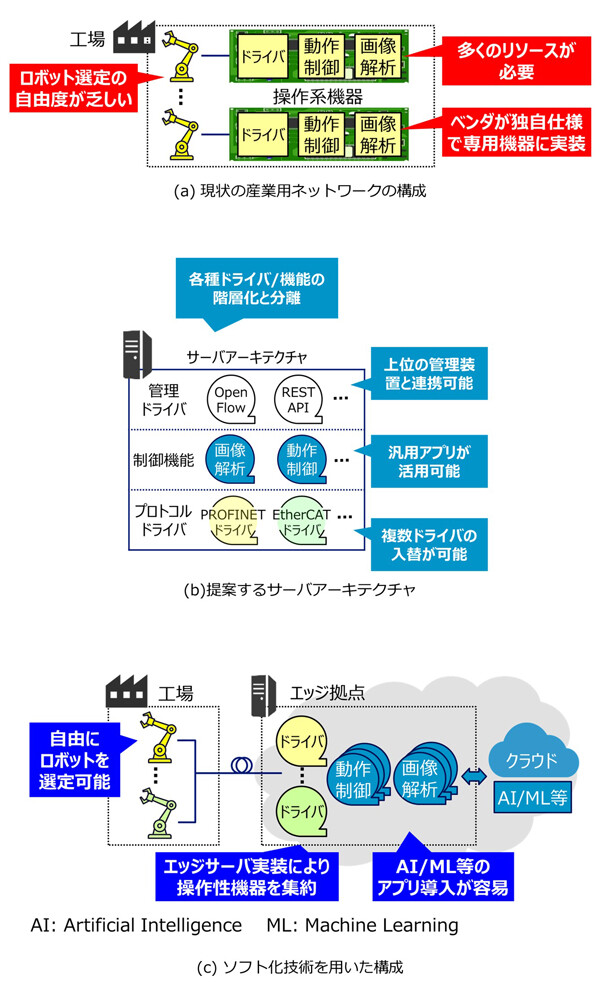
図1 現状の構成と提案構成の違い
■実験の概要
今回技術確立したロボット操作に必要な操作系機能のソフト化に関し、その有効性を確認するために、操作系機能を光回線で接続した汎用サーバで実装し、ロボットを自動で動作制御させました。具体的には、工場内で動作することを想定したロボット付近にカメラとトランプを配置し、エッジ拠点を想定した光回線越しのサーバには、画像解析・動作制御・プロトコルドライバを実装しました(図2・3)。カメラで認識したトランプを、サーバで処理して、色に応じて自動振り分けをする実験を行い、滞りなく動作できることを確認しました。さらに、操作系機能の一つであるプロトコルドライバをPROFINET *3ドライバからEtherCATドライバ*4に入れ替えて、異なるドライバでも動作可能であることも確認しました。
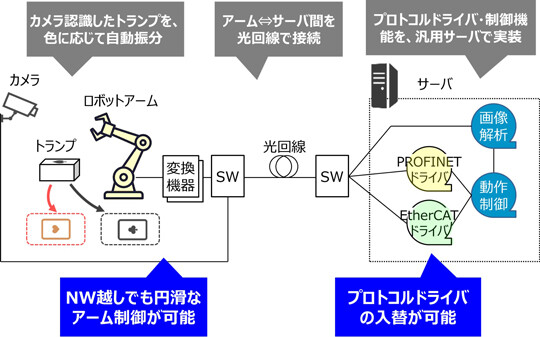
図2 実証構成

図3 実証の模様
用語解説
*1 OpenFlow
OpenFlowは、ソフトウェア定義ネットワーク(SDN)の環境で、ネットワーク機器をリモートで制御するプロトコル。
*2 REST API
REST(Representational State Transfer)は、Webアーキテクチャのスタイルの1つであり、Web上でリソースを表現し、アクセスするための設計原則の集合体。REST APIとは、Webアプリケーションの機能を外部のクライアントアプリケーションから利用するためのAPIの一種。
*3PROFINET
ファクトリーオートメーションで用いられる産業用イーサネットプロトコル。世界で最も普及しているプロトコル。
*4 EtherCAT
ファクトリーオートメーションで用いられる産業用イーサネットプロトコル。高精度な同期制御を実現可能なプロトコル。
![]()