
ドローンによるマンホール自動点検診断技術
自動飛行ドローンと画像処理を用いてマンホールの点検と診断を効率的に
本技術は、自動飛行ドローンと画像処理を用いたマンホール点検診断技術です。新たに開発した小型自動飛行ドローンを用いてマンホール内部の映像を取得し、撮影画像から劣化を自動的に検出することができます。これにより、現在作業者が行っているマンホールの点検診断作業の安全性と効率性を向上できます。
背景
現在のマンホールの点検は、路上に保安施設を設置し、作業者がマンホール内部に入孔し目視点検をする方法や、カメラを取り付けた長尺の棒を用いて地上から内部の画像を撮影する方法で行っています。
しかし、点検作業には車両が保安施設内に飛び込んでくる事故のリスク、マンホールに入孔する際に梯子から墜落・転落する事故のリスク、地下空間で作業する際の酸欠事故のリスク等といった安全性の問題があります。また、作業者が入孔する際には、マンホール内部の水の排水や換気といった稼働が発生するため、作業効率性に問題があります。
現行のマンホール本体の診断は、現場目視もしくは撮影画像を事務所等で劣化度を判断しています。しかし、現行の方法は、作業者の判断による個人差やマンホール全てに対して劣化状態を確認する稼働面に問題があることから、点検品質の均一化と効率化が求められています。さらに、将来的に点検作業者が不足することへの対策が求められています。
しかし、点検作業には車両が保安施設内に飛び込んでくる事故のリスク、マンホールに入孔する際に梯子から墜落・転落する事故のリスク、地下空間で作業する際の酸欠事故のリスク等といった安全性の問題があります。また、作業者が入孔する際には、マンホール内部の水の排水や換気といった稼働が発生するため、作業効率性に問題があります。
現行のマンホール本体の診断は、現場目視もしくは撮影画像を事務所等で劣化度を判断しています。しかし、現行の方法は、作業者の判断による個人差やマンホール全てに対して劣化状態を確認する稼働面に問題があることから、点検品質の均一化と効率化が求められています。さらに、将来的に点検作業者が不足することへの対策が求められています。

図1 (a)マンホールの入孔点検の様子 (b)棒カメラによる点検の様子
概要
本技術は、マンホールのような非GPS環境かつ狭小な空間において自動的にドローンを飛行させて内部の映像を取得できる点検技術と画像から壁面の小さな露筋※1や汚れの中から金物腐食を高精度に検出することができる診断技術により構成しています。
以下に、各技術の特徴の詳細を記載します。
- 【点検技術】
一般的にドローンの自動飛行には、GPS※2のようなGNSS※3を用いますが、マンホールは地下空間なので使えません。さらに、狭小空間のためドローンは小型でなくてはならず、搭載する機器類を最小限にする必要があります。そこで本技術は、ドローンに搭載できる小型の超音波、レーザ、カメラの3種類のセンサを活用して、非GPS環境下における自動飛行を小型ドローンで実現しました。各種センサの組み合わせにより、本ドローンはマンホールへの入孔、内部撮影、出孔までの、点検に必要な一連動作を完全自動で実施できます。
- 【診断技術】
劣化の検出には、機械学習のひとつである深層学習による劣化検出手法を構築しました。本手法は、撮影画像に対して色空間を最適化することで、マンホール壁面に付着した水垢や泥等の汚れの中から、高精度に露筋や金物腐食を検出することができます。さらに、モデルの学習方法を改良することにより、マンホール内に発生した微小な領域の露筋や金物腐食も見落しなく検出することに成功しています。
※1:鉄筋コンクリート構造物に発生する劣化の一つ。コンクリート表面に発生したひび割れから水が内部鉄筋まで到達し腐食が発生する。腐食膨張により表面コンクリートが押し出され剥離を起こし、腐食鉄筋が表面に露わになった現象のこと。
※2:Global Positioning System
※3:Global Navigation Satellite System
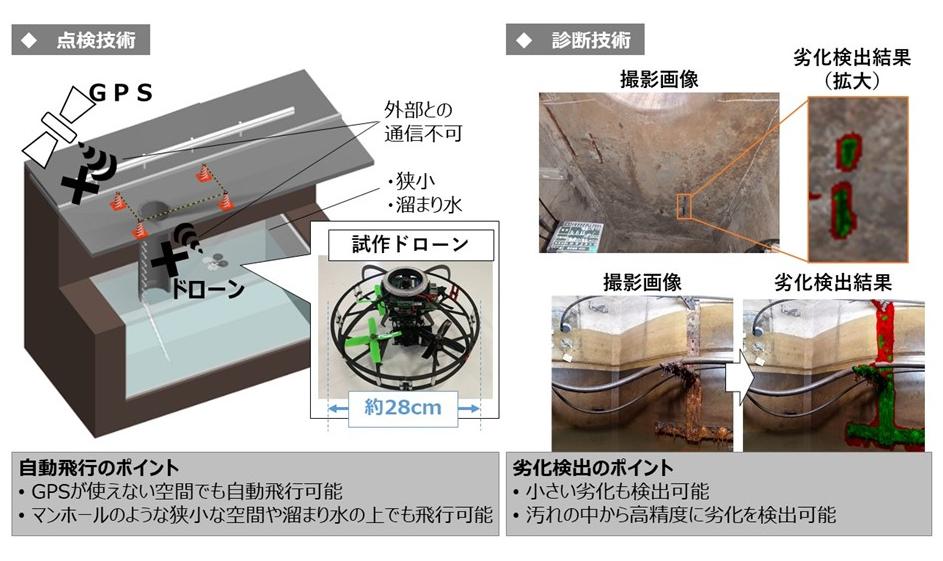
図2 点検技術と診断技術の概要
今後の予定
点検技術では、特殊形状のマンホールを飛行できる技術の確立を目指します。診断技術では、コンクリート表面のひび割れの自動検出の確立を目指します。
担当者
シビルシステムプロジェクト 点検診断系グループ
荒武 淳 (グループリーダ)
櫻田 洋介(主任研究員)
内堀 大輔(研究主任)
櫻田 洋介(主任研究員)
内堀 大輔(研究主任)
 TOP |